When looking at biomechanics I am less concerned with the exact derivation of mechanical and biological principles, but more with the consequences for acrobatics …
Mechanics:
Acrobats are essentially dealing with 3 energies. Potential, kinetic and rotational energy. These energies have as common quantities: the mass and the force vector.
The mass is for an acrobat a very personal given size, which is also associated with its available power (= m * a). It determines significantly whether a person should be a flyer or a base. In addition, you can’t change much the mass of a person in a short-term and usually this also does not even make sense in the long-term … Weight reduction and muscle-building are counterproductive to each other.
The force vector is straight only with respect to the potential energy (= m * g * h) and the acceleration is linear, since it always points to the center of the earth and the mass of the earth is constant.
On the other hand, the kinetic energy (= ½ * m * v ²) is more difficult to analyze, since neither the direction nor the force course are linear. Usually, at the contemplation of the kinetic energy, the starting and ending point of the mass and the sum of the force vectors (= the force line) is represented with a linear arrow between these points. The system thus is “free made”.
For the contemplation of a closed system from the outside this is certainly a sensible method. However, to equip a robot with the functions of a base, this approach is doomed to failure because necessary corrections are neglected. Without these corrections of the base in real-time, the flyer will simply drops down. The robot needs acting more like a PID controller with different input and output variables and a control loop. No base is able to accelerate the flyer absolutely linear with a constant force vector. In addition, the flyer instinctively changes his shape and thereby creates a rotation, after all, he does not want to drop down. The resulting shear force, which is oblique to the line of force, requires a correction in realtime of the base.
As long as the base accelerates or decelerates the flyer, a rotation is not helpful. The flyer should therefore keep himself in these phases as possible stretched. As soon as the flyer approaches the upper peak of his ballistic curve, the kinetic energy = potential energy. The flyer is in the high relieving, in which he seems weightless for the base. At this moment, the balancing is very simple, similar to a balloon. Unfortunately, this moment lasts only very briefly. The base thus initiates the desired rotation even before that by deliberately using shear forces.
Now we have reached the point where the rotational energy (= m * r ²) becomes important. It increases exponentially with the radius of the mass point to the axis of rotation. So when the flyer rotates, while the base balancing him, he generates disproportionate shearing forces. (The effect on the base can be seen very nicely from the example of the 10m water jumper. The more rotation is left before diving into the water, the more water splashes around.) So if rotation is the goal, the flyer should contain preferably no kinetic energy, as this generates only undesirable shear forces. This means for the flyer that he has to end the rotation (initiated by the base) during the high relieving. For a fast rotation, a compact position is helpful. The flyer stretches again to finish the rotation.
Biomechanics:
Biology provides acrobats with necessary insights into joints, muscles, and functional chains. How much can joints and muscles be stressed? Which muscles need to be warmed up, stretched or built up? How can joint wear and unfavorable loads be avoided?
Functional chains not only include the necessary muscles and joints, but also automated movement, focusing and balance. The control loop of a human is automated through many repetitions, so that he only instinctively implements corrections and no longer has to think about what would take too long. Distracting thoughts interfere with this control loop and lead to errors. After all, every acrobat has to rely on his feeling and his body.
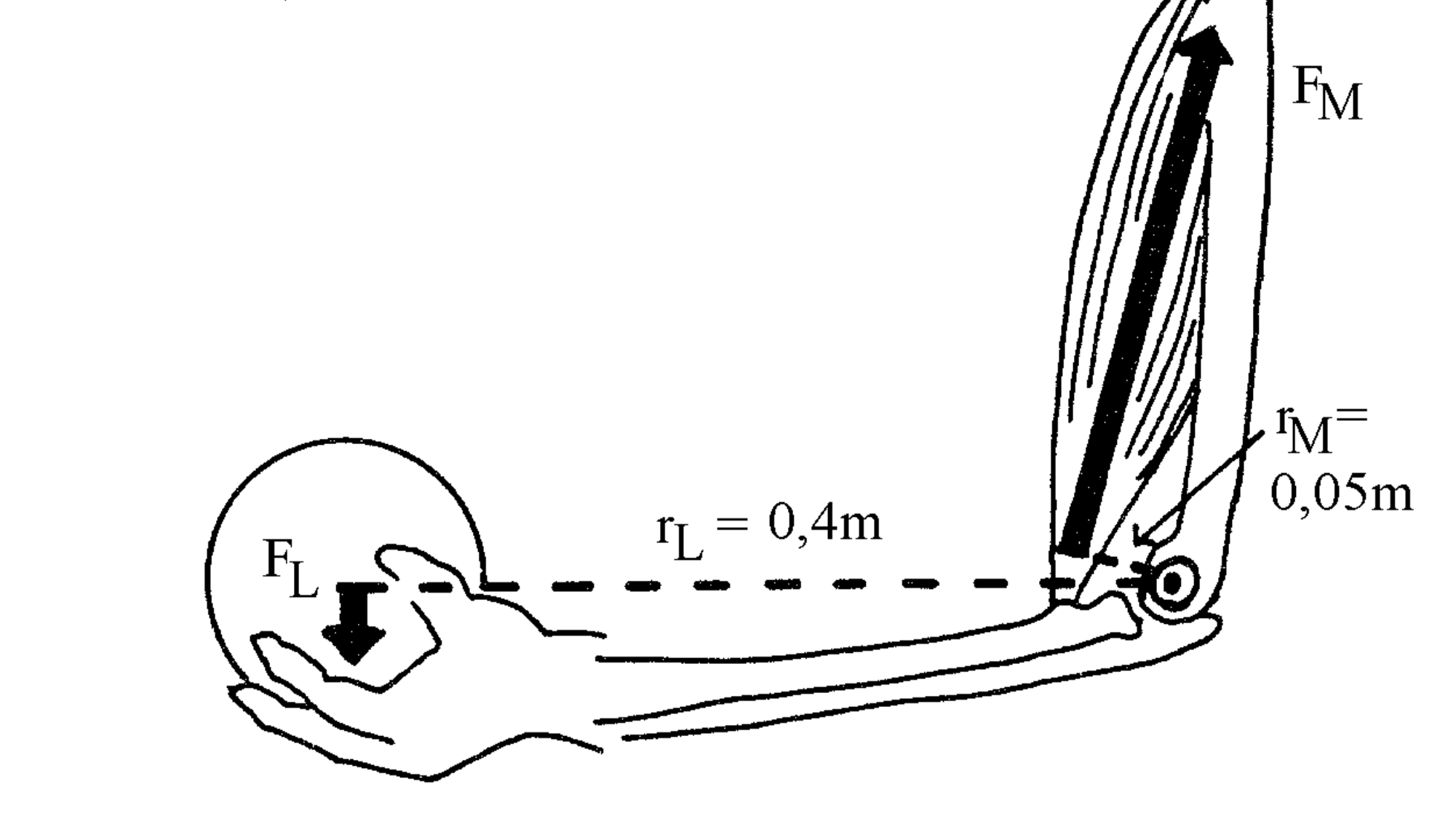
Whether a muscle can hold or lift a load depends on the muscle moment and the load moment. Joints are multi-dimensional and are responsible for the efficiency and aesthetics of the movement …
Source:
Foundations of kinematics and biomechanics
Prof. Dr. K. Wiemann / Dr. med. T. Jöllenbeck
6. corrected and extended edition
Bergische Universität Wuppertal, winter semester 1998/99
Fundamentals of biomechanics
It compares from which angle (e.g. upper arm to forearm) the muscle (e.g. biceps) can no longer support a weight. In short, the more open the angle, the more force the muscle needs to close …
e.g. Pull-up, where it is most difficult to overcome the stretch.
This has a decisive consequence when catching …
To catch well, you have to grab the flyer as early as possible. However, this leads to poor angular relationships at the moment of the first contact. If then the expected force line was wrongly anticipated, or the flyer generates shear forces, a catch is usually impossible. The base is kicked like a punching bag through the room.
Source:
Biomechanik_des_menschlichen_Bewegungsapparates_Biomechanik_im_Sport_Spitta_Verlag.pdf
Deutsch